Update #6: December 21, 2021
Hardware Design
Author: Eric Wong
With 2020 wrapping up and all of us here at UAS@UCLA finished with a successful Fall
Quarter, I want to take a moment to reflect on the accomplishments the Hardware Team achieved throughout this
research challenge.
As the pandemic hit and forced everyone home for the duration of Spring Quarter, UAS@UCLA
was motivated to remain an active organization and decided to pursue the NASA Undergraduate Student Research
Challenge. We came in with the goal of developing drone swarm technology to indefinitely lift a small payload.
Our proposal, titled AVIATA (Autonomous Vehicle Infinite Air Time Apparatus) and relevant to NASA's ARMD
(Aeronautics Research Mission Directorate) Strategic Thrust 6 initiative: Assured Autonomy for Aviation
Transformation, was submitted back in June. Specifically, our Hardware Team was tasked with developing the drone
swarm system, the frame each drone attaches too, and the docking mechanism.
After a successful proposal, our
team first had to crowdfund $2000 in order to receive the NASA grant and continue working on the project. We
surpassed this goal and ended up raising over $2,500 in about a month of crowdfunding on our GoFundMe page! Once
finished with crowdfunding, we dug deep into the technical aspects of our project, and presented our design in a
Preliminary Design Review at the end of October.
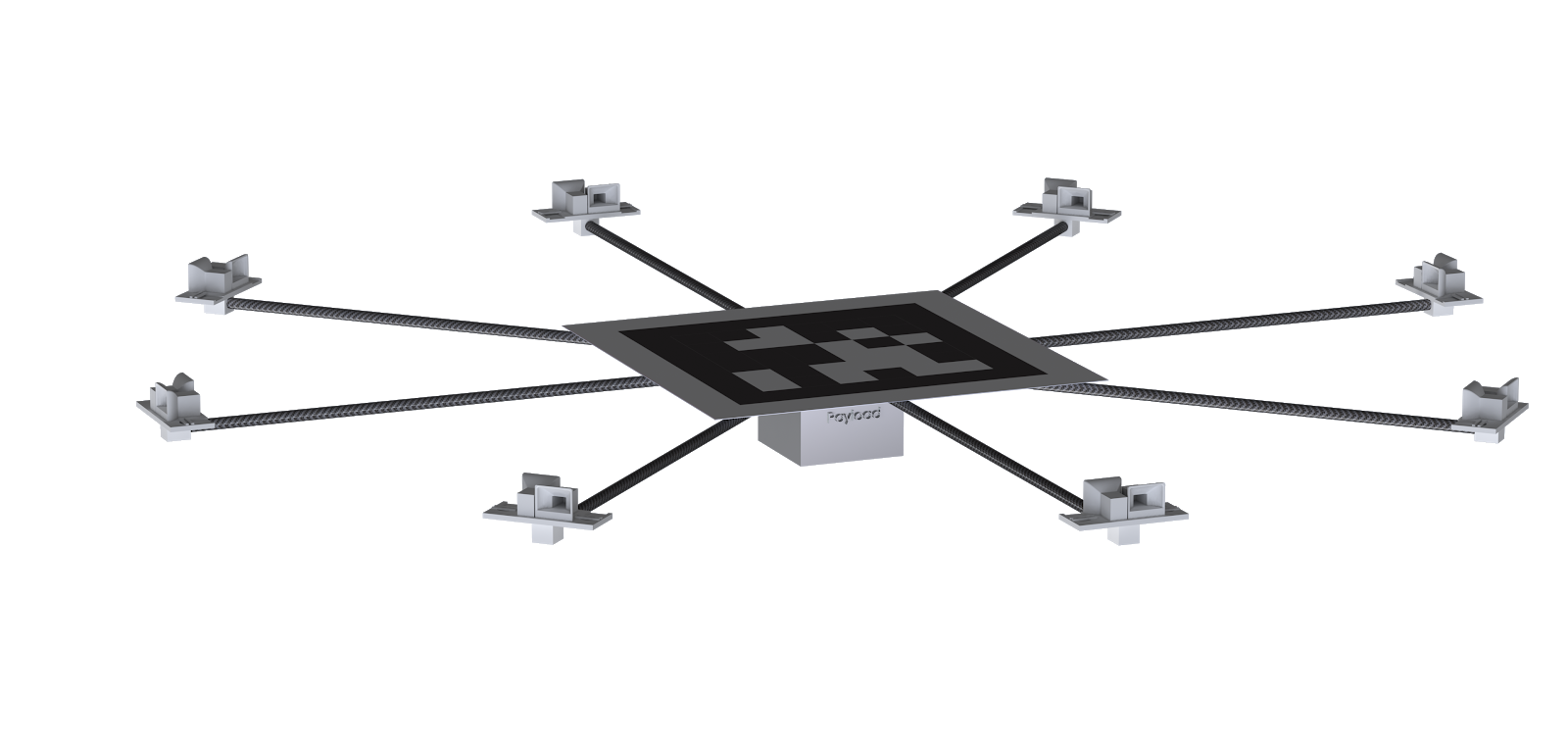
Our initial frame design was an octagonal shape, however,
due to the benefits of easily mounting an Apriltag (for long range docking identification) and payload to an
octocopter-like frame, we opted for the latter design. This design consists of 8 boom arms protruding from a
central frame made out of carbon fiber plates. On the top plate would be the large Apriltag, and secured to the
bottom plate would be a payload bay. This payload bay is a rectangular box with a door that opens to securely
fit a box that holds a 2kg box, or the payload. Landing legs on 4 of the carbon fiber booms allow for the frame
to land without damaging the docking mechanisms and payload.
For our drone swarm, we intended on using
commercial off the shelf (COTS) hexacopters. In order to generate more thrust from each drone, we opted for
using S4 batteries rather than S3 batteries so that we could maximize the thrust output of the drones without
having to worry about motor saturation when lifting the frame and payload. This was determined after performing
motor thrust tests with both S3 and S4 batteries. We also plan on further modifying the drone to contain the
docking attachment and necessary communications systems.
Lastly, our docking system, probably one of the most
complex tasks for the Hardware team, was designed with two main systems: the docking joint on the frame, and the
docking attachment on the drone. The docking joint on the frame has a “funnel” that guides the drone's docking
attachment to form a connection that does not require power to sustain. It also has two permanent magnets of
opposite polarities that are used to align the drone in the proper orientation with the funnels. The docking
attachment is connected to the bottom of each hexacopter and contains internal rack and pinion keys that are
used to slide into the funnels. It also has battery powered electromagnets that work in conjunction with the
permanent magnets on the docking joint for alignment and undocking.
Overall, while we have made significant
progress on our Hardware design with AVIATA, there is still much to be done with implementing and iterating the
physical hardware. Our next steps involve the structural strength testing of components, further motor/power
testing, and testing and increasing robustness of our docking system in preparation for our Critical Design
Review at the end of Winter Quarter. Thanks for your engagement this quarter, and we hope you stick with us
through the next one!
Software Design
Author: Axel Malahieude
The software side of AVIATA has continued to work with and improve our simulations to
prepare for running our code on physical drones. We've had a strong start to AVIATA, and have high hopes for
2021.
The docking team has been focused on implementing the 3 stage docking system previously mentioned -
using a large central target to help the drone find AVIATA, then using it to align and fly to the peripheral
target, and finally using that peripheral target to actually get close enough to dock. An important part of this
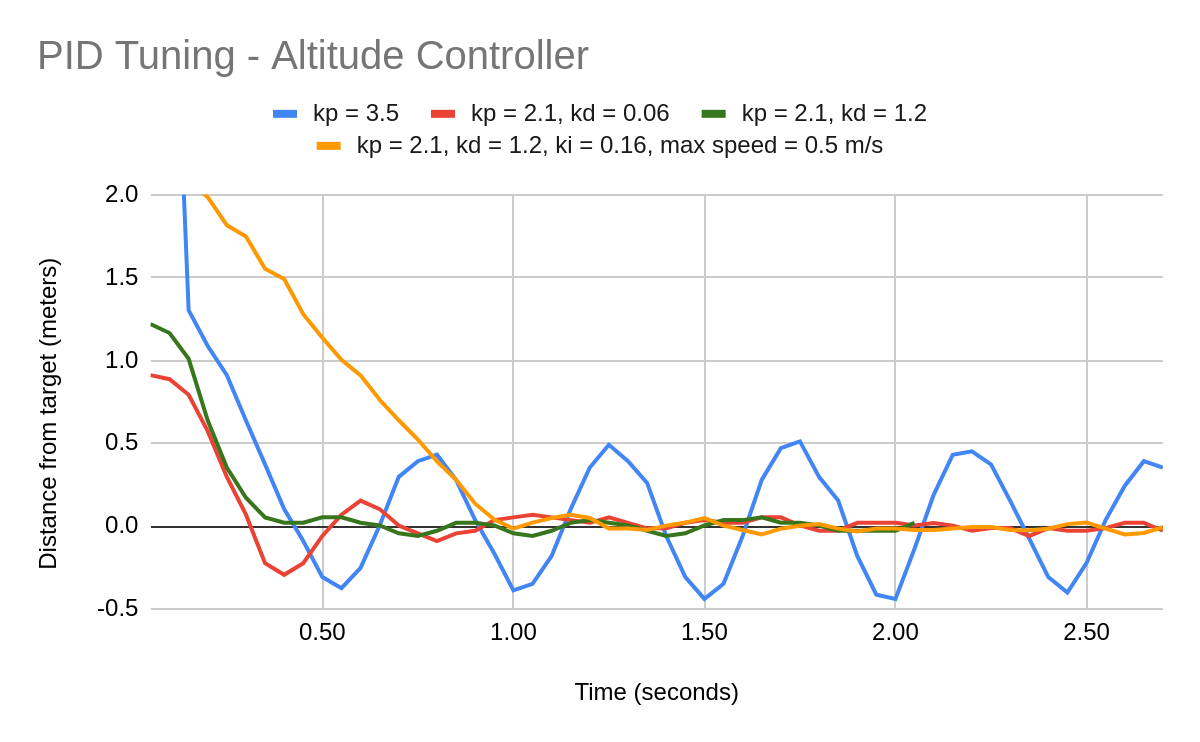
process is how the drone decides to move based on where it sees the target. To do this, we are using a PID
controller which we've spent the last week tuning. Meanwhile, other members of the team are working on
implementing the other stages of docking. Specifically, we are finalizing stages 1 and 3, which involve homing
in on a target using an on-board camera, and continuing work on stage 2, which involves flying from the big
central target on the frame to one of the 8 peripheral targets at our specified docking location. Finally, we
are improving our target detection algorithm by generating 3D simulations in Gazebo, a drone simulation
software.
Figure 1: The PID tuning process for the controller that regulates our altitude, where the yellow
line represents the final parameters we decided to use. You can see that the drone is able to stabilize itself
at the desired altitude within 1 second, which is much better performance than any of the other
trials.
The controls software subteam, which has become our largest and most complex subteam, has
continued to work on the collaborative nature of AVIATA. A few modifications were necessary to the flight
controller software, named PX4, to support this, while the groundwork has been laid for inter-drone
communication using custom ROS2 messages.This is necessary for having the leader drone inform the follower
drones how they should be flying, since they'll all be attached to one another. All of this work is being done
with the goal of running this C++-based controller program on the Raspberry Pi that will accompany each
drone.
Finally, the communications team has completed the software-focused research and initial testing of
the OSLR-v2 mesh networking library. We have moved on to physical testing by ordering WiFi 6 antennas and plan
to use these with Raspberry Pis we already have to set up a proof-of-concept mesh network. This will provide the
framework for inter-drone communications that the controls team will depend on, as we hope to have it
operational by the time our Critical Design Review comes up.
Afterword
With 2020 ending, we'd like to thank everybody who's been reading these blogs and keeping up
with our progress. It's been a very long and eventful year, and we're looking forward to continuing in 2021.
Next year, we'll be starting off strong by presenting our work directly to NASA. An internal poster session will
showcase all of the grant recipients across NASA's research programs, including the USRC, which we are a part
of. After our Critical Design Review in late February or early March, we'll be integrating all the software
teams and the hardware team together to have a final product by June. We hope to see you next year!
Acknowledgment
These results are based upon work supported by the NASA Aeronautics Research Mission
Directorate under award number 80NSSC20K1452. This material is based upon a proposal tentatively selected by
NASA for a grant award of $10,811, subject to successful crowdfunding. Any opinions, findings, and conclusions
or recommendations expressed in this material are those of the authors and do not necessarily reflect the views
of NASA.
 Join
Calendar
Officers
Gallery
Tools
Join
Calendar
Officers
Gallery
Tools