Since our last update, each of the software teams have officially begun physical testing.
After spending so much time implementing our designs in simulation, we finally had the opportunity to run our
code on physical drones and get a better idea of our progress and future areas to focus on.
To test our
cooperative control software, we rigidly connected two drones and were able to have a leader drone successfully
send attitude setpoints to a follower and demonstrate a position hold.
One of Ryan's videos:
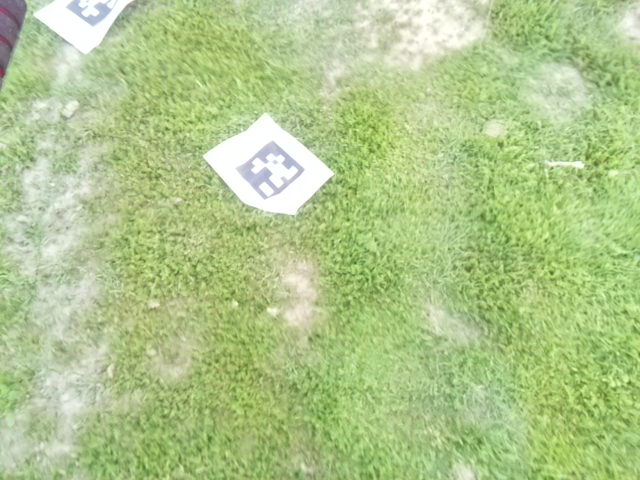
The docking team also started testing the preliminary portions of the
docking process. We successfully had a Raspberry Pi mounted on the drone activate offboard mode and send
velocity setpoints to takeoff and land autonomously. In addition, the camera on the drone relayed a video stream
to the RPi in which we were able to detect the AprilTag placed on the ground.
Here is a picture from the
camera on-board the drone during this docking testing procedure, where we can clearly see the target that the
drone detected:
On the communications side, we tested sending and receiving data in a setup with three nodes and were able
to get quantitative results on delay time and packet loss rate.
Some of Yuchen's test results, showing that
networking and packet delay times are within acceptable bounds:
We also presented our progress and the results of these tests at our Critical Design Review last week to
alumni and faculty and received great feedback and helpful pointers for the future. We'll be spending the next
few weeks incorporating that feedback and continuing our testing. Some next steps include PID tuning, mesh
network incorporation, and autonomous navigation to a vision target.
These results are based upon work supported by the NASA Aeronautics Research Mission
Directorate under award number 80NSSC20K1452. This material is based upon a proposal tentatively selected by
NASA for a grant award of $10,811, subject to successful crowdfunding. Any opinions, findings, and conclusions
or recommendations expressed in this material are those of the authors and do not necessarily reflect the views
of NASA.
 Join
Calendar
Officers
Gallery
Tools
Join
Calendar
Officers
Gallery
Tools